



IntelliTug es un proyecto de Wärtsilä y la Autoridad Marítima y Portuaria de Singapur.
Persigue el primer buque comercial autónomo de superficie marítima (MASS) en aguas portuarias de Singapur.
El sistema de IntelliTug comprende un conjunto integrado de hardware y software inteligente para dotar de capacidades autónomas.
La recopilación de datos se lleva a cabo continuamente para soportar el algoritmo de prevención de colisiones.
La Autoridad Marítima y Portuaria de Singapur (MPA) respalda plenamente los esfuerzos de la industria para permitir que las operaciones autónomas sean una realidad en uno de los centros logísticos portuarios más activo del mundo.
Las primeras pruebas de mar del proyecto IntelliTug finalizan con éxito.
Acaban de anunciar que han finalizado con éxito las primeras pruebas en mar. El PSA Polaris, un remolcador de puerto, propiedad y operado por la Autoridad Marítima y Portuaria de Singapur, ha realizado estas pruebas.
El proyecto es una colaboración entre Wärtsilä, la Autoridad Portuaria y Marítima de Singapur, la sociedad de clasificación Lloyd’s Register y el Centro de Tecnología marina y offshore de (TCOMS).
Está cofinanciado por el fondo de tecnología e innovación marítima de la Autoridad Portuaria y Marítima de Singapur (MINT).
Llevado a cabo en Singapur, las pruebas comenzaron en septiembre de 2019. Verificaron la capacidad del IntelliTug para evitar una variedad de obstáculos, incluidos en simulador y en situaciones reales.
Estas pruebas son las primeras en Singapur para buques de superficie autónomos marítimos comerciales (MASS) que utiliza la normativa MPA MASS para un entorno seguro acotado.
Estos ensayos son parte de la iniciativas tomadas por la Autoridad Portuaria de Singapur para acelerar su capacidad de I+D en este campo y validar nuevos conceptos operativos y tecnologías relacionadas con MASS.
El PSA Polaris es un remolcador de puerto de 27 m de eslora con hélices azimutales.
Ha sido equipado con un conjunto de sensores, que incluye un radar de alta resolución RS24 Wärtsilä y el sistema de posicionamiento dinámico también de Wärtsilä, para dotarlo de capacidades autónomas.
La recopilación de datos a través de los sensores ha estado en curso desde el inicio del proyecto junto con el desarrollo de un algoritmo para evitar colisiones.
El proyecto tiene como objetivo desarrollar y probar en situaciones reales las capacidades de las embarcaciones inteligentes y opciones viables hacia formas más inteligentes, seguras y más eficientes de operar un remolcador de puerto.
Ensayos rigurosos
Primero se han a cabo pruebas en el simulador de Wärstilä de la integración de los sistemas y pruebas digitales.
TCOMS por su parte validó la recopilación de datos procedentes de los sensores, así como el desarrollo del gemelo digital del remolcador.

Lloyd’s Register ha participado en todas las fase del proyecto certificando todos y cada uno de los procesos seguidos en el diseño.
Wärtsilä ha optado por ser muy rigurosos y realizar las pruebas de mar escalonadamente. Primero para demostrar las capacidades fundamentales de seguridad y precisión del sistema. Después realizará una planificación de rutas reales sin obstáculos. Irán aumentando la dificultad con pruebas más complicadas, primero probadas en simulador. Estos últimos se realizan gracias a la colaboración entre Tug Master y Master Mariner, bajo la supervisión de la Autoridad Portuaria.
Pruebas de mar

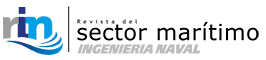
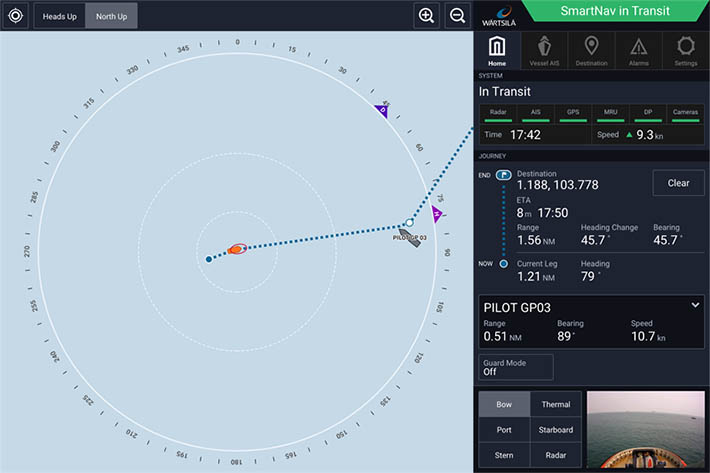
Durante las pruebas en el mar, se utilizó un nuevo sistema de navegación inteligente, que fue desarrollado durante el proyecto de colaboración entre Tug Masters de la Autoridad Portuaria de Singapur, y que sirvió para seleccionar los casos de entre los cientos de casos de ensayos realizados.
El sistema permite al usuario ver fácilmente las rutas trazadas, para evitar colisiones, en tiempo real. El sistema de navegación inteligente también envía datos de velocidad y trayectoria al sistema de posicionamiento dinámico, que controla la navegación a lo largo de la ruta de forma segura a velocidad variable y hasta un máximo de 10 nudos.
Seguirán durante este 2020 desarrollando sistemas para este proyecto para mejorar las capacidades autónomas de este tipo de embarcaciones.








{kind=link}