


Los AUV son robots submarinos no tripulados diseñados para realizar diferentes misiones entre las que destaca la investigación, la monitorización medioambiental y la inspección, mantenimiento y reparación. Son, sin duda, un estimable avance tecnológico con el que poder acometer misiones arriesgadas sin poner en peligro la vida humana.
Esta semana hacemos un repaso a los diez robots submarinos que mayores profundidades alcanzan. Nuestro top ten lo abre el Nereus, robot que alcanza los 11.000 metros de profundidad. A él le siguen una tanda de 9 robots capaces de sumergirse 6.000 metros bajo la superficie del agua.
1. Nereus
 El Nereus es un AUV americano construido por el Instituto Oceanográfica Woods Hole (WHOI). Es un vehículo submarino híbrido y autónomo (HROV) manejado por control remoto que entró en servicio en el año 2009. Se diseñó como vehículo de investigación para operar a profundidades de hasta 11 kilómetros,punto más profundo medido en los océanos y que se conoce como la Fosa de Challenger. La presión a esa profundidad es aproximadamente 1095 veces la de la superficie.
El Nereus es un AUV americano construido por el Instituto Oceanográfica Woods Hole (WHOI). Es un vehículo submarino híbrido y autónomo (HROV) manejado por control remoto que entró en servicio en el año 2009. Se diseñó como vehículo de investigación para operar a profundidades de hasta 11 kilómetros,punto más profundo medido en los océanos y que se conoce como la Fosa de Challenger. La presión a esa profundidad es aproximadamente 1095 veces la de la superficie.
Sus dimensiones son 5 metros de eslora,2 metros de manga y un puntal de 1,5 metros. Funciona con baterías de litio recargables y puede alcanzar una velocidad de 3 nudos. Pesa 2.800 kilogramos.
Cuando la misión requiere descender a grandes profundidades,el robot está unido mediante un cable de fibra óptica al buque desde el cual se maneja. El diámetro aproximado de dicho cable es el de un cabello humano.
2. OKPO 6000
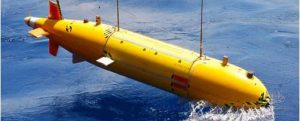
El robot OKPO 6000 es el prime r AUV coreano y puede llegar a sumergirse hasta 6.000 metros de profundidad sin estar conectado a la nave nodriza. Ha sido desarrollado por Daewoo Heavy Industries.
r AUV coreano y puede llegar a sumergirse hasta 6.000 metros de profundidad sin estar conectado a la nave nodriza. Ha sido desarrollado por Daewoo Heavy Industries.
Tiene una eslora de 3,8 metros,una manga de 0,70 metros y un puntal de 0,70 metros. Se fabricó en aluminio y tiene forma de torpedo. Puede alcanzar una velocidad de 1,54 m/s y pesa 950 kilogramos.
Se diseñó para realizar estudios geofísicos,estudios de campo,rastreamiento de objetos hundidos y análisis oceanográficos principalmente. Consta de medios de video-cámara,cámara fija y sónares de exploración.
3. Remus 6000
Fue diseñado por Hydroid y es de tipo torpedo. Este robot puede alcanzar los 6.000 metros de profundidad y desplazarse a una velocidad cercana a los 4 nudos. Se diseñó para realizar monitorización ambiental,estudios oceanográficos,supervisar tuberías,etc.
Tiene una eslora de 3,84 metros,una manga de 0,71 metros,un puntal de 0,71 metros y pesa 862 kilogramos. Consta de un paquete de baterías de litio recargables que aportan 11 kW a la hora. Tiene una autonomía de 22 horas a la velocidad indicada anteriormente. Está dotado con sónar de barrido lateral y una cámara de alta resolución digital entre otras facilidades.
El robot ha realizado más de 1.000 inmersiones. Gracias a su forma de torpedo,el lanzamiento del Remus 6000 se desarrolla mediante una plataforma en la que se eleva el vehículo y se coloca colgado de la popa para proceder a su inmersión.

4. Dorado
La serie de robots se diseñó por Monterey Bay Aquarium Research Institute (MBARI) y al igual que los robots anteriores tienen forma de torpedo. El más pequeño de ellos tiene como finalidad la monitorización y evaluación medioambiental y el estudio oceanográfico. El segundo,tiene como función realizar cartografías de la costa y mapear el fondo marino.
El primero de ellos tiene unas dimensiones de 3,66 m x 0,54 m x 0,54 m y pesa 476 kilogramos. El segundo,por su parte,tiene unas dimensiones de 5,3 m x 0,53 m x 0,53 m y pesa 680 kilogramos.
Ambos dos pueden descender hasta una profundidad de 6.000 metros pero el primero tiene una autonomía de 20 horas y el segundo de 17,5 horas.
5. Benthic Rover

El Benthic Rover ha sido diseñado por Monterey Bay Aquarium Research Institute (MBARI) y es de estructura espacial abierta. Tiene como función principal realizar estudios geofísicos y exploración de campos de minas. Puede ser operado hasta a 6.000 metros de profundidad.
Tiene unas dimensiones de 2,5 metros de eslora,1,5 metros de manga y un puntal de 1,30 metros. Tiene un peso de 1.400 kilogramos y se desplaza a 0,02 m/s. El “cerebro” del vehículo está protegido por una carcasa de titanio esférica y consta de “flotadores” de color naranja y amarillo fabricados en espuma incompresible para evitar que el vehículo de hunda en los lodos que puedan existir en zonas de grandes profundidades.
6. SAUVIM
El SAUVEM ha sido diseñado por Marine Autonomous Systems Engineering y tiene como función realizar inspecciones,reparaciones,mantenimiento del casco,etc.
Tiene forma ovalada y unas dimensiones de 6,10 metros de eslora,2,10 metros de manga y un puntal de 1,80 metros. Tiene un peso de 6.500 kilogramos y puede sumergirse a una profundidad de 6.000 metros.

7. Autosub6000
Fabricado por el Centro Nacional de Oceanografía,Reino Unido,es la versión más reciente de la serie Autosub AUV que llega hasta los 6.000 m de profundidad y cuenta con baterías de polímero de litio recargable en vez de células alcalinas de manganeso. Se ha empleando en los últimos 10 años en numerosas campañas en el Ártico y en la Antártida. Tiene forma de torpedo con las siguientes dimensiones: 5,50 m x 0,90 m x 0,90 m. Alcanza 1 m/s de velocidad y tiene una autonomía de 70 h. Tiene una capacidad de carga útil de 0,5 m3.

8. Mary Ann and Ginger
Este robot fue diseñado por Hydroid y tiene cuerpo con forma de torpedo. Se diseñó con la idea principal de que se dedicase a realizar el mapeo del fondo marino,búsqueda y recuperación de objetos hundidos y el estudio oceanográfico.
Tiene unas dimensiones de 3,84 m x 0,71 m x 0,71 m y el casco está fabricado en titanio. Puede alcanzar una profundidad de 6.000 metros y tiene una autonomía de 22 horas.
Se desplaza mediante hélice y puede alcanzar una velocidad de 2,60 m/s.
9. Autosub Long Range
Otro tipo de AUV desarrolado en el Centro Oceanográfico Nacional en Southampton,Reino Unido. Con una velocidad de desplazamiento de 0,4 m/s es capaz de llevar a cabo misiones de hasta seis meses de duración o de 6.000 km. Puede sumergirse hasta una profundidad de 6.000 metros. No se conocen las dimensiones principales de este dispositivo,tan solo que está fabricado en titanio.

10. Autonomous Benthic Explorer
Este robot fue diseñado por el Instituto Oceanográfica Woods Hole (WHOI) y es de estructura espacial abierta. Se diseñó para realizar mapas del fondo marino y realizar estudios geofísicos.
Tiene unas dimensiones de 3 m x 2 m x 2,50 m y pesa 550 kilogramos. Puede alcanzar una profundidad de 6.000 metros y tiene una autonomía de 14 horas. La velocidad máxima permitida es de 0,17 m/s.
Se desplaza mediante hélice y puede alcanzar una velocidad de 2,60 m/s.








{kind=link}