El SS Lake Illawarra era un granelero de 140 metros que golpeó el puente Tasman y se hundió en 1975. Esto resultó en la trágica pérdida de 12 vidas: siete tripulantes y cinco automovilistas que cruzaban el puente. Los restos del naufragio se encuentran debajo de la superficie cercana, pero no se veían con claridad.
Ahora, gracias a CSIROscorpio se ha fusionado la luz y el sonido para producir el primer mapa completo del naufragio y su posición debajo del puente. Las imágenes reúnen a la perfección dos conjuntos de datos separados para crear una vista completa y convincente.
Vídeo final del mapeo del SS Lake Illawarra
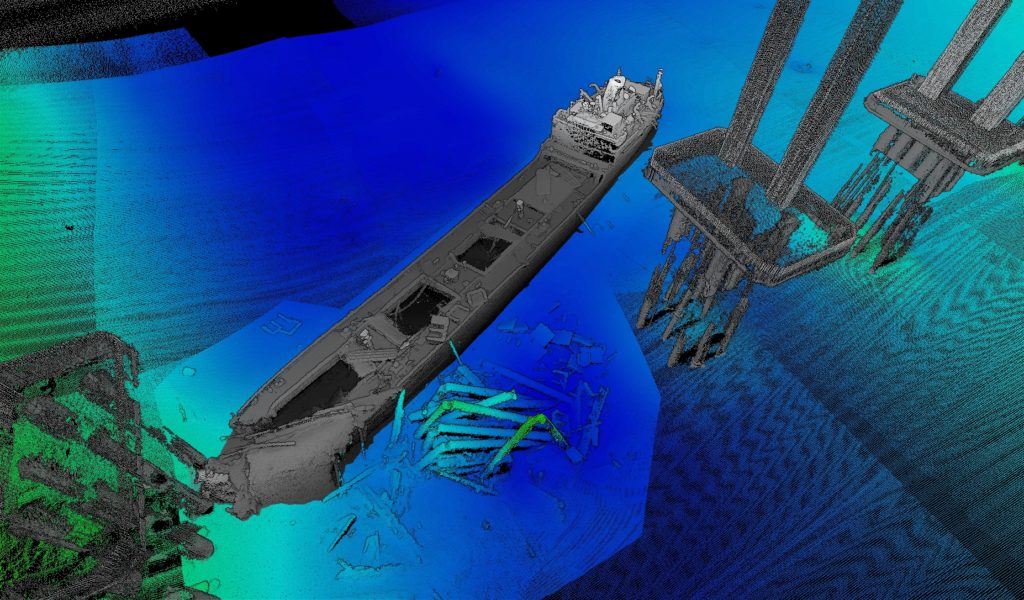
El mapeo muestra el SS Lake Illawarra junto al puente entre pilones en el lado de la costa este. La proa del barco está cerca del tercer pilón desde la orilla y el barco apunta en un ángulo de 45 grados hacia el centro del río. En su punto más alto, la embarcación se encuentra a unos 15 metros por debajo de la línea de flotación. Su punto más cercano (la proa del barco) está a unos 125 metros de la costa.
Dicho mapeo se ha llevado a cabo en dos fases:
El sistema de escaneo láser móvil (MLS), propiedad de Jacobs, se instaló en la cubierta del buque de investigación, RV South Cape. El sistema MLS se utilizó para escanear características por encima de la línea de flotación, como el puente y la costa circundante. La plataforma del puente (carretera) y los accesos también se escanearon, esta vez, usando el MLS sobre un vehículo. Se recolectaron al rededor de tres millones de puntos de datos por segundo en un rango de 475 metros. Un total de 4 pasadas hicieron falta.
Para la segunda fase, se empleó una ecosonda multihaz de alta frecuencia a bordo del RV South Cape. Así se inspeccionaron los restos del naufragio, los escombros del puente, los pilones del puente y el lecho del río. Las ecosondas multihaz emiten pulsos de sonido que viajan al lecho marino y rebotan en un receptor. Así se crea el mapa del fondo.
La cantidad de datos se transforman en un modelo 3D final que ha sido pulido y los datos bien procesados. El sistema multihaz cartografió objetos en el naufragio y el lecho marino hasta 20 cm.
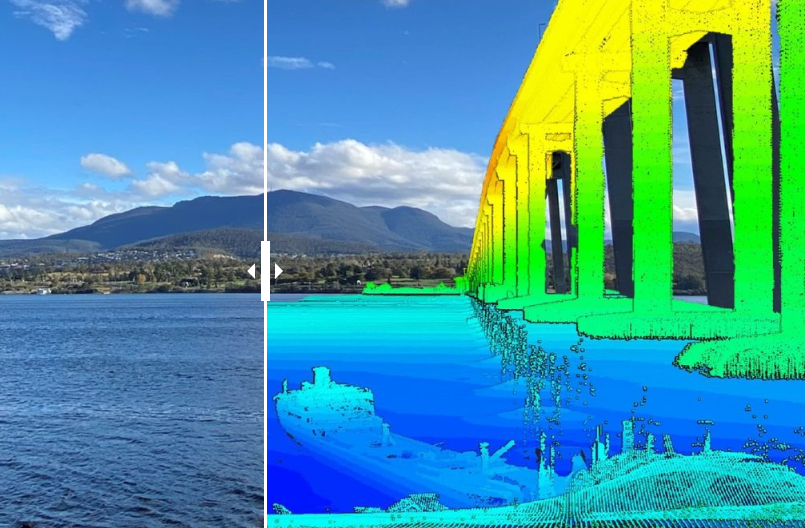
Los dos conjuntos de datos se fusionaron en un gemelo digital. El escáner láser sobre el agua (altimetría láser de superficie) y los datos de la ecosonda debajo del agua (batimetría acústica submarina) se fusionan en un modelo que da un resultado en 3D que, visto junto a las fotos originales, ayuda a entender el nivel de precisión y detalle del proyecto.
Es importante destacar que el mapeo ofrece una base para que los ingenieros navales controlen la degradación de los restos del naufragio y la erosión del lecho del río. También proporciona una herramienta útil para orientar a quienes bucean ocasionalmente en los restos del naufragio.
Este modelo podrá emplearse en otros naufragios similares para controlar los materiales y el impacto en las aguas que tiene un hundimiento.
Este nuevo indicador aporta un valor adicional al análisis de la temperatura marina y su…
El astillero vasco reanuda su actividad tras ser adquirido por SAFEN Drydocs, del Grupo AD…
Ayer, 14 de julio, fue el Día Mundial de la Orca. ¿Sabrías qué hacer si…
Trasmed convierte su ruta Valencia-Ibiza en un observatorio privilegiado para disfrutar del eclipse solar del…
Gondán ha completado la entrega del Juan Jorge R., un nuevo ferry de pasaje construido…
Bluenewables, Naturgy y la Autoridad Portuaria de Valencia impulsan un proyecto pionero de fotovoltaica flotante…
{kind=link}
{kind=link}
{kind=link}
Deja un comentario